介绍
先介绍二维旋转变换,然后由此推广到三维绕坐标轴旋转,再推广得到绕三维任意轴旋转的罗德里格斯旋转公式。
1.二维
如果要求$P$逆时针旋转$\theta$得到的$P^{‘}$,记$Q$为$P$逆时针旋转90°后的向量,即$(-P_y,P_x)$,则$P$与$Q$正好组成了该平面内的一组正交向量,任何向量都可由其线性表出,由基本几何和三角学可得到:
则
写成矩阵为
2.三维绕坐标轴旋转
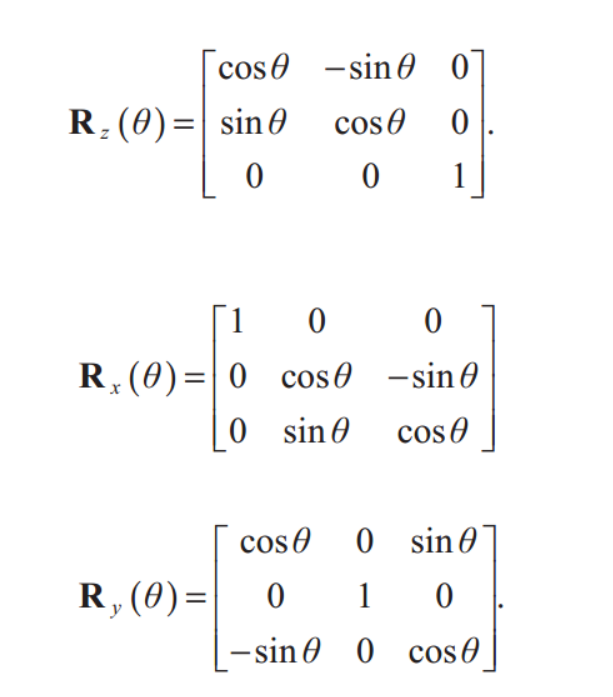
注意$R_y(\theta)$与其他不同是因为如果按照逆时针旋转,由$x\times z=-y$,则得到$y$轴负方向,因此需改为顺时针,即$-\theta$,这无论是在左手坐标系还是右手系都是相同的。
3. 三维绕任意轴旋转
向量$P$绕任意轴$A$旋转$\theta$角度证明:
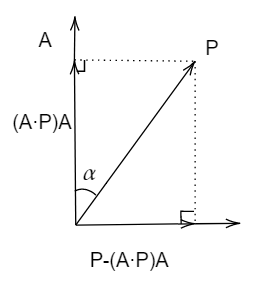
不妨设$A$为单位向量,同时$P$可分解为与$A$平行和垂直的两个分量,分别为:
如图所示
故最终结果
其中为旋转后得到的向量,如图
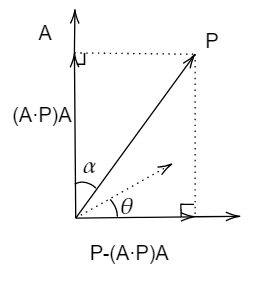
为求得其值,需找到一组线性组合来表示它,可选与其旋转90°后的向量这两个向量作为组合,可以得知即为该向量,同时它的长度是与相等的,这是因为
所以
所以
记$I$为单位阵,则矩阵形式为
其中记
为罗德里格斯旋转公式,而将其展开写成一个矩阵就可得到旋转矩阵。
本博客所有文章除特别声明外,均采用 CC BY-SA 3.0协议 。转载请注明出处!