该论文以基函数来描述标架,首先说明了该方法在2D下的可行性,然后拓展到3D形式。3D形式延续《Boundary aligned smooth 3D cross-frame field》中使用球谐函数作为基函数,不同的是该文使用了不同的多项式来在球上展开,并重新定义了目标函数,优化了求解,速度和质量都得到提升。
一、 2D
1.定义
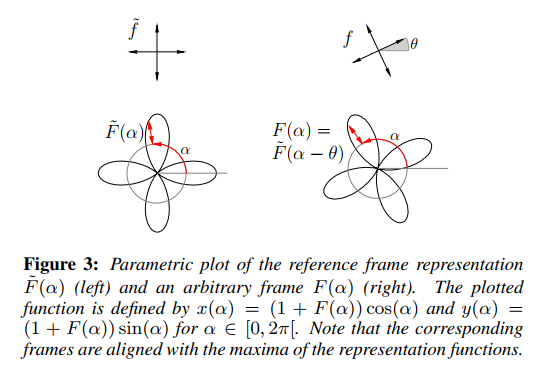
该文采用基函数来表示标架:
即用表示参考标架函数,表示旋转后的标架函数,下图是说明。
2. 能量函数
定义能量函数如下:
ps:最后一步可以化简是因为是正交的,且模长为。
3. 矩阵化
定义边界或限制条件如下,
即是指定标架的方向,如为边界,即为法向方向。
将转换成形式,其中,所以是维向量,为顶点数,定义初始条件如下,
即相邻点相等。
边界条件设置如下,
其中,为常数(经验得来)。
其中,矩阵如下(为边),下标是行,上标是列
最小二乘方程的解等价于
解出该最小二乘方程后,可得到解并标准化:
本博客所有文章除特别声明外,均采用 CC BY-SA 3.0协议 。转载请注明出处!